


In recent years, engineers have developed a range of robots capable of mimicking human movements with impressive precision. Some of these machines can even play sports, such as the robots at RoboCup, an international soccer competition for robots.
Researchers from the Biomimetic Robotics Laboratory at MIT have recently unveiled an innovative robotic system designed for table tennis. This platform can swiftly and accurately hit balls using a racket, demonstrating various styles of play and applying spins with remarkable accuracy, as detailed in a research paper hosted on the arXiv preprint server.
“Our lab has always aimed to create high-performing robotic systems by improving both hardware and control, following our previous work like the Mini-Cheetah,” explained Kendrick Cancio, a co-author of the study, to Tech Xplore.
“We saw an opportunity to develop this table tennis system for the Robotics and AI Institute, allowing us to delve into dynamic manipulation and aim for human-level performance on a robot designed to mimic human movement.”
The lab’s research focuses on two main aspects: mobility of robotic legs and the rapid handling of objects. Each presents its own difficulties.
For legged robots, one major hurdle is adapting to environmental changes, while crucial object manipulation requires precise execution of intended movements.
“Table tennis combines various control challenges, requiring both adaptability and precision as information about the incoming ball changes,” remarked co-author David Nguyen to Tech Xplore. “This creates a unique problem that we believe our specialized robotics hardware can tackle effectively.”
The new robotics platform, developed by Nguyen, Cancio, and Sangbae Kim, includes a robotic arm and an advanced control algorithm. This algorithm predicts the trajectory of the ball and adjusts the arm’s actions to ensure a successful hit, ensuring the racket meets all designated conditions.
“The arm’s movement path is continuously adjusted to make sure the paddle hits the ball accurately in terms of location, speed, and angle,” Nguyen explained.
“Through planning for the entire swing rather than just future actions, we found greater reliability, though it requires more aggressive maneuvers from the arm. This offers a unique edge since we can maximize our custom hardware’s capabilities beyond what’s possible with standard systems.”
The robotics system is made up of two key parts: perception and action modules. The perception module employs a commercial motion tracking system to locate specially designed table tennis balls.
“We calculate the ball’s path to determine where and when to strike,” Cancio described.
“Simultaneously, we tackle a nonlinear optimization problem that utilizes these metrics, along with our desired strike technique, to craft a swing path for the arm. Our predictive controller constantly updates this arm trajectory, allowing real-time adjustments as the ball’s position changes.”
The robotic arm in this table tennis system is a customized version of a humanoid arm that was also created at MIT. It’s designed for rapid movement, featuring high torque and low rotor inertia, enabling quick swings and fast adjustments if initial predictions about the ball’s trajectory prove incorrect.
“We showcase the ability to adapt our motion dynamically to engage with a moving object,” Nguyen stated. “While table tennis may not have life-saving implications, this control technology could be useful in complex search and rescue missions where a general-purpose robot might need to catch an item.”
In their trials, Nguyen, Cancio, and Kim tested their robotic table tennis system in the real world and achieved impressive results. The system managed to successfully hit incoming balls 88% of the time, with an average speed of 11 m/s, employing three different striking techniques.
-
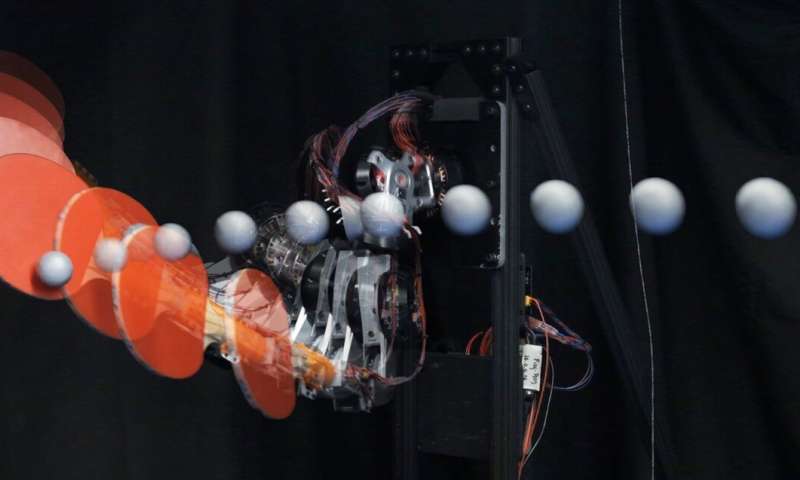
Illustration of a swing and ball path. Credit: Nguyen et al.
-
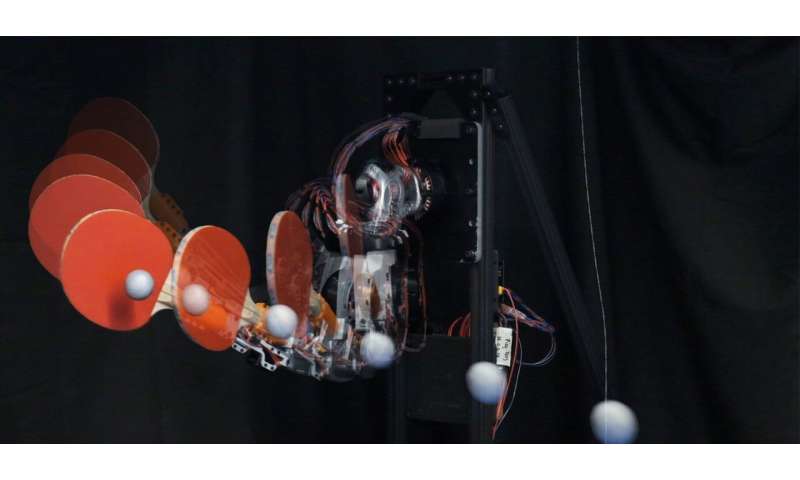
Illustration of a swing and ball path. Credit: Nguyen et al.
-
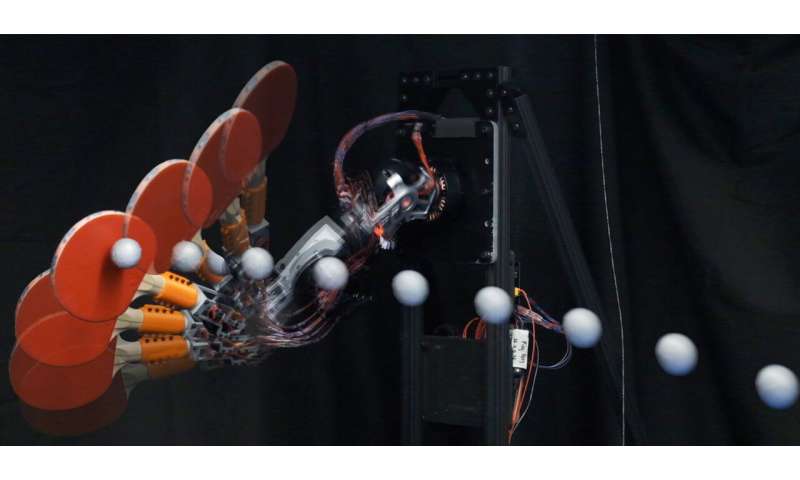
Illustration of a swing and ball path. Credit: Nguyen et al.
“Currently, robotics is largely divided between traditional model-based approaches and newer reinforcement learning techniques, with many believing the latter will become dominant,” noted Cancio. “Our work shows that optimization methods based on constraints remain relevant and valuable for high-performance systems, and we hope to harness the strengths of each approach when beneficial.”
This new tabletop tennis system has the potential to motivate other engineers to create similar robotic applications. Additionally, Nguyen, Cancio, and Kim aspire to adapt their hardware and control techniques for other dynamic tasks.
“Since we submitted our initial paper in September, we’ve made significant improvements to the system,” added Nguyen. “We can now direct our shots to specific areas of the table and plan for the entire trajectory of the ball’s impact with the paddle.”
In future research, the team aims to enhance the platform further. By employing a gantry structure to expand the workspace of the MIT arm, they could enable the robot to play full table tennis matches against human players.
“We aim to continue improving our system’s performance, expanding its operating space with a gantry and increasing ball exit speeds,” Cancio said.
“We also hope to begin tracking standard balls, facilitating better comparisons between our robot and human players, as well as other robotic systems.”
For more details:
David Nguyen et al, High Speed Robotic Table Tennis Swinging Using Lightweight Hardware with Model Predictive Control, arXiv (2025).
DOI: 10.48550/arxiv.2505.01617
If you would like to see similar Tech posts like this, click here & share this article with your friends!


